ExtremControl is a humanoid whole-body control framework aiming to minimize the latency when responding to high-level control interface.
Instead of relying on whole-body retargeting, we directly control the robot's extremities.
To further reduce the latency, we incorporate a velocity feedforward term into PD controller.
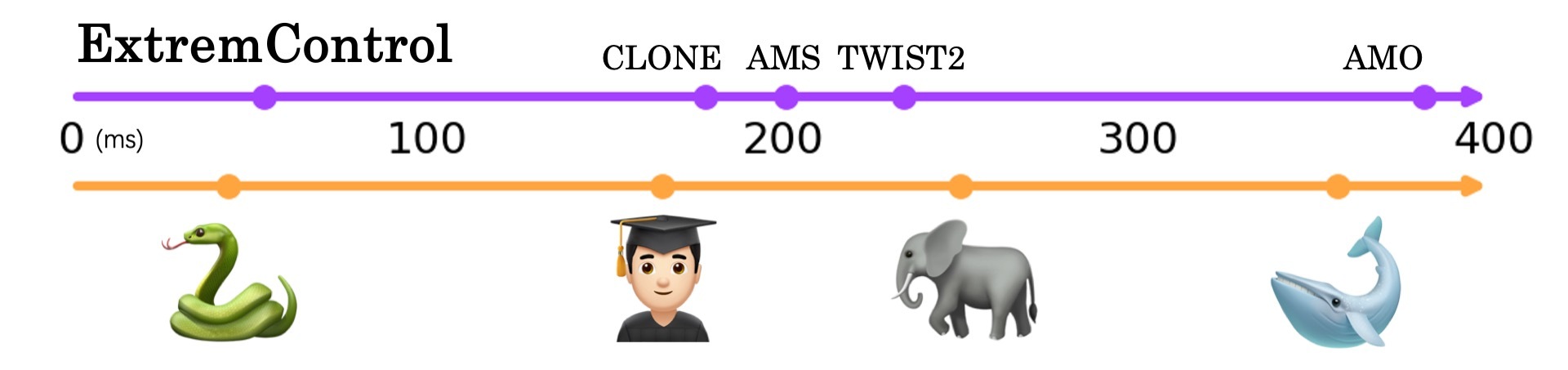
Built on top of ExtremControl, we develop a humanoid teleoperation system that achieves end-to-end latency as low as 50ms.
Although our experiments are conducted with MoCap and VR systems, the framework is interface-agnostic—you can seamlessly integrate your own high-level control input.
The codebase is fully open-sourced and built on Genesis, enabling additional features beyond what is shown here. Click the
link to explore more.
ExtremControl is a humanoid whole-body control framework minimizing the latency when responding to high-level control interface.
Instead of relying on conventional whole-body retargeting, we directly control the robot's extremities.
To further reduce the latency, we incorporate a velocity feedforward term into the PD controller.
Built on top of ExtremControl, we develop a humanoid teleoperation system that achieves end-to-end latency as low as 50ms.
Although our experiments are conducted with MoCap and VR systems, the framework is interface-agnostic—you can seamlessly integrate your own high-level control input.
The codebase is fully open-sourced.